| (2.7) |
| (2.8) |
| (2.9) |
|
ガリレイ変換によって移り変わるどの慣性系においても、同じ運動の法則が成立する。という原理を「ガリレイの相対性原理」と呼ぶ。この法則の「運動の法則」の部分を電磁気学を含めた「物理法則」に書き換えたいというのが相対論の目標である。後で詳しく述べるが、その目標達成のために「ガリレイ変換」の部分も「ローレンツ変換」に書き換えられることになる。
ローレンツ変換によって移り変わるどの慣性系においても、同じ物理法則が成立する。というのが「特殊相対性原理」である6。
|
|
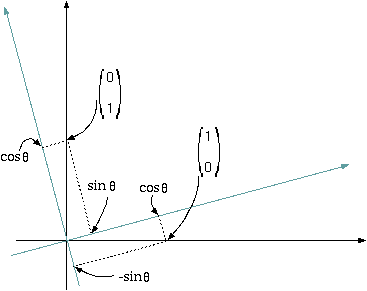
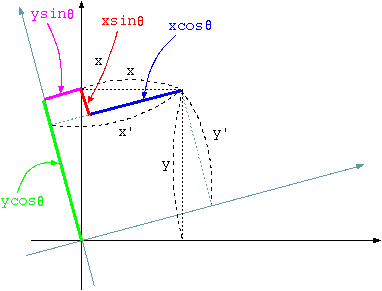
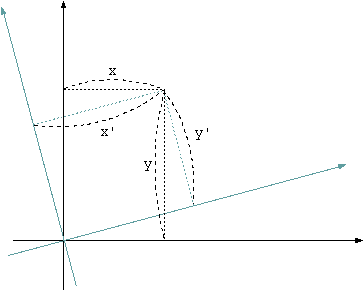 しかしここまでは1次元の話を重ねているだけで面白味がない。2次元ならではの座標変換は、右の図のような、座標軸の回転である。
しかしここまでは1次元の話を重ねているだけで面白味がない。2次元ならではの座標変換は、右の図のような、座標軸の回転である。
| (3.1) |
|
| (3.2) |
| ( |
| ) |
|
| ( |
| ) |
|
| (3.3) |
| ( |
| ) |
| ( |
| ) を座標変換した結果の ( |
| ) |
| ( |
| ) を座標変換した結果である ( |
| ) |
| ( |
| )と( |
|
| ( |
| )と( |
|
| (3.4) |
| (3.5) |
| (3.6) |
| (3.7) |
| (3.8) |
| (3.9) |
|
|
|
| ( |
| ) | = |
| ( |
| ) |
|
|
| ( |
| ) |
|
| ( |
| ) |
| (3.10) |
| ( |
| ),( |
| ) |
| ( |
| ) |
|