| x′ = |
1
| (x−βct), y′ = y, z′=z, ct′ = |
1
| (ct−βx) |
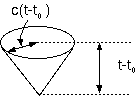 1.が主張しているのは、光速度不変の原理を満足せよ、ということである。ある時空点(t0,x0,y0,z0) (x′座標系では(t′0,x′0,y′0,z′0))から光が出て、時空点(t,x,y,z) (x′座標系では(t′,x′,y′,z′))にたどりついたとする。時刻t(あるいは時刻t′)には、その光はc(t−t0) (あるいはc(t′−t′0))広がっている。ゆえに(x−x0)2+(y−y0)2+(z−z0)2−c2(t−t0)2=0が成立するならば、(x′−x′0)2+(y′−y′0)2+(z′−z′0)2 −c2 (t′−t′0)2=0も成立せねばならない。光速度はどっちの座標系でもcだからである。くどいようだがもう一度書く。これは実験事実である。また、ここで光速度一定という現象に着目してはいるが、これは光を特別視しているわけではなく、マックスウェル方程式が生み出す物理現象の代表として光を使っているということに注意して欲しい。「光速度一定」は「どの座標系でも成立すべき物理法則」の代表なのである29。
1.が主張しているのは、光速度不変の原理を満足せよ、ということである。ある時空点(t0,x0,y0,z0) (x′座標系では(t′0,x′0,y′0,z′0))から光が出て、時空点(t,x,y,z) (x′座標系では(t′,x′,y′,z′))にたどりついたとする。時刻t(あるいは時刻t′)には、その光はc(t−t0) (あるいはc(t′−t′0))広がっている。ゆえに(x−x0)2+(y−y0)2+(z−z0)2−c2(t−t0)2=0が成立するならば、(x′−x′0)2+(y′−y′0)2+(z′−z′0)2 −c2 (t′−t′0)2=0も成立せねばならない。光速度はどっちの座標系でもcだからである。くどいようだがもう一度書く。これは実験事実である。また、ここで光速度一定という現象に着目してはいるが、これは光を特別視しているわけではなく、マックスウェル方程式が生み出す物理現象の代表として光を使っているということに注意して欲しい。「光速度一定」は「どの座標系でも成立すべき物理法則」の代表なのである29。
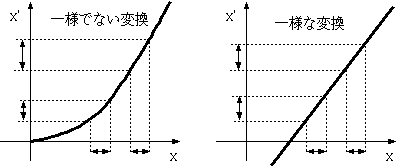 2.が主張しているのは、この変換が一様であれ、ということである。
たとえばx′ = ax2のような変換をしたとすると、x=0付近と、そこから遠い場所では、xが変化した時のx′の変化量が違う。これはつまり、x座標系で測った1メートルが、x′
座標系では場所によって10センチになったり3メートルになったりと、違う長さになるということである。しかし今考えているのは座標系の一様な運動である
から、こんなことは起こらないだろう(ある座標系での1メートルが別の座標系では等しく50センチになることはあり得るとしても!)。この条件を満たすた
めには、(x,y,z,ct)と(x′,y′,z′,ct′)が一次変換で結ばれなくてはならない。
3.が主張しているのは、たとえばこういうことである。x 軸の正方向へ速さvで運動している場合と、x軸の負方向へ速さvで運動している場合を比べたとする。この二つは、最初にx軸をどの方向にとったかというだけの違いであって、物理の本質的な部分は違わないはずである。つまり、ある方向へ移動する座標系だけが特別扱いされるようなことはあってはならない。
以下で、これらの要請だけからガリレイ変換に替わる新しい座標変換を導く。
x′系の空間的原点x′=y′=z′=0が、x座標系で見ると速度vでx軸方向に移動していて、時刻t=0では原点が一致しているとする。このことから、x′=0 という式を解くと、x=βctという答えが出るようになっていることがわかる。この条件はガリレイ変換x′=x−vtでも成立する。2.の条件があるので、
2.が主張しているのは、この変換が一様であれ、ということである。
たとえばx′ = ax2のような変換をしたとすると、x=0付近と、そこから遠い場所では、xが変化した時のx′の変化量が違う。これはつまり、x座標系で測った1メートルが、x′
座標系では場所によって10センチになったり3メートルになったりと、違う長さになるということである。しかし今考えているのは座標系の一様な運動である
から、こんなことは起こらないだろう(ある座標系での1メートルが別の座標系では等しく50センチになることはあり得るとしても!)。この条件を満たすた
めには、(x,y,z,ct)と(x′,y′,z′,ct′)が一次変換で結ばれなくてはならない。
3.が主張しているのは、たとえばこういうことである。x 軸の正方向へ速さvで運動している場合と、x軸の負方向へ速さvで運動している場合を比べたとする。この二つは、最初にx軸をどの方向にとったかというだけの違いであって、物理の本質的な部分は違わないはずである。つまり、ある方向へ移動する座標系だけが特別扱いされるようなことはあってはならない。
以下で、これらの要請だけからガリレイ変換に替わる新しい座標変換を導く。
x′系の空間的原点x′=y′=z′=0が、x座標系で見ると速度vでx軸方向に移動していて、時刻t=0では原点が一致しているとする。このことから、x′=0 という式を解くと、x=βctという答えが出るようになっていることがわかる。この条件はガリレイ変換x′=x−vtでも成立する。2.の条件があるので、
| (8.1) |
| (8.2) |
| (8.3) |
| (8.4) |
| (8.5) |
| (8.6) |
| (8.7) |
| (8.8) |
 は、xやtのスケールの変化(ローレンツ短縮やウラシマ効果)を表している。また、ct′の式にct−βxが現れることは、tの同時刻とt′の同時刻が場所によって変化すること(t=一定とt′=一定がグラフ上で平行線ではない)を示しているのである。
なお、ここまでの計算では簡単のために運動方向をx方向に限ったし、y,z座標に関しても同じ方向を向いているとした。一般的には運動方向が任意の方向を向いたものや、これに座標軸の回転が組み合わさったものが出てくる可能性がある。
は1だと思ってもさしつかえない。また最後のct-βxのところも、βxは忘れてよい。x-βctのβctは、後ろからcがかかっているので忘れてはだめ。と考えると、βが小さい状況では、
は、xやtのスケールの変化(ローレンツ短縮やウラシマ効果)を表している。また、ct′の式にct−βxが現れることは、tの同時刻とt′の同時刻が場所によって変化すること(t=一定とt′=一定がグラフ上で平行線ではない)を示しているのである。
なお、ここまでの計算では簡単のために運動方向をx方向に限ったし、y,z座標に関しても同じ方向を向いているとした。一般的には運動方向が任意の方向を向いたものや、これに座標軸の回転が組み合わさったものが出てくる可能性がある。
は1だと思ってもさしつかえない。また最後のct-βxのところも、βxは忘れてよい。x-βctのβctは、後ろからcがかかっているので忘れてはだめ。と考えると、βが小さい状況では、| x′ = | x−βct, y′ = y, z′=z, ct′ = | ct |
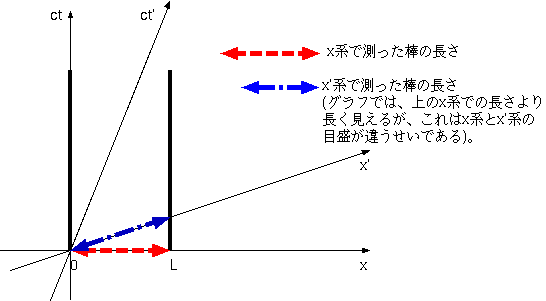 ローレンツがad hocに導いたローレンツ短縮と似た現象が、この座標変換でも導かれることを示そう。今、一つの棒をx−t座標系で見て静止するように置いたとする。棒の長さをLとして、一方の端をx=0、もう一方の端をx=Lに置いたとする。時間tが経過してもこのxの値は変化しない。では、これをx′ 座標系で見るとどうか。棒の一方の端の時空座標を(x1,t1)または(x′1,t′1)で、もう一方の端の時空座標を(x2,t2)または(x′2,t′2)で表すとすれば、
ローレンツがad hocに導いたローレンツ短縮と似た現象が、この座標変換でも導かれることを示そう。今、一つの棒をx−t座標系で見て静止するように置いたとする。棒の長さをLとして、一方の端をx=0、もう一方の端をx=Lに置いたとする。時間tが経過してもこのxの値は変化しない。では、これをx′ 座標系で見るとどうか。棒の一方の端の時空座標を(x1,t1)または(x′1,t′1)で、もう一方の端の時空座標を(x2,t2)または(x′2,t′2)で表すとすれば、
|
|
| (6.14) |
倍になっている(縮んでいる)ことがわかる。
 この式は形としてはローレンツがマイケルソン・モーレーの実験結果を説明するために導入した短縮と同じである。逆に言うと「ローレンツ短縮が起こるべし」という要請から、係数Aを
決めることも可能であったことになる。しかし、今求めた新しい意味のローレンツ短縮と、古い意味のローレンツ短縮は根本的に意味が違う。まず、ローレンツ
はエーテルとの相対運動が理由で機械的に短縮が起こると考えたが、ここでの短縮は座標変換によって生じたものであって、力が働いて起こる短縮とは全く意味
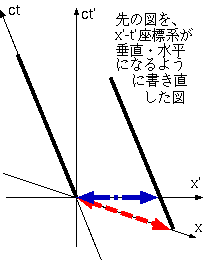
が違う。また、図で説明してあるように、座標系が違うことによって「同時刻で空間的に離れた2点」という2点の定義の仕方そのものが変わってくる。ガリレ
イ変換ではこんなことは生じない。古い意味のローレンツ短縮はガリレイ変換を使った物理の中で考えられたものだから、同様に「座標系が違えば同時刻が違
う」ということを考慮せずに単に短縮すると仮定している。
何よりここで導かれた短縮は光速度不変の原理と特殊相対性原理から自動的に導出されたもので、筋道だった説明が与えられていることが大きな違いである。
この式は形としてはローレンツがマイケルソン・モーレーの実験結果を説明するために導入した短縮と同じである。逆に言うと「ローレンツ短縮が起こるべし」という要請から、係数Aを
決めることも可能であったことになる。しかし、今求めた新しい意味のローレンツ短縮と、古い意味のローレンツ短縮は根本的に意味が違う。まず、ローレンツ
はエーテルとの相対運動が理由で機械的に短縮が起こると考えたが、ここでの短縮は座標変換によって生じたものであって、力が働いて起こる短縮とは全く意味
が違う。また、図で説明してあるように、座標系が違うことによって「同時刻で空間的に離れた2点」という2点の定義の仕方そのものが変わってくる。ガリレ
イ変換ではこんなことは生じない。古い意味のローレンツ短縮はガリレイ変換を使った物理の中で考えられたものだから、同様に「座標系が違えば同時刻が違
う」ということを考慮せずに単に短縮すると仮定している。
何よりここで導かれた短縮は光速度不変の原理と特殊相対性原理から自動的に導出されたもので、筋道だった説明が与えられていることが大きな違いである。
|