|
|
d¦Ó dt | = | ˘ĺ |
| = |  |
|
| (9.3) |
 ds2¤Ď¤¤¤í¤ó¤ĘÉäąć¤¬¤˘¤ę¤¨¤ëˇŁÉäąć¤Ë¤č¤Ă¤Ć
ds2¤Ď¤¤¤í¤ó¤ĘÉäąć¤¬¤˘¤ę¤¨¤ëˇŁÉäąć¤Ë¤č¤Ă¤Ć
| (9.4) |
| (9.5) |
| ( |
| ) |
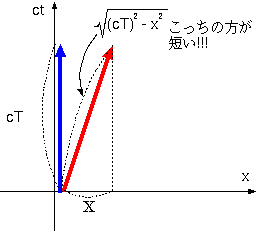 ˇˇĄ°ĄéĄŐ¤ň¸«¤ë¤ČĽĐ¤áŔţ¤ÎĘý¤¬Äą¤Ż¸«¤¨¤ë¤¬ˇ˘şŁÄą¤µ¤ÎÄęµÁ¤¬Ł´Ľˇ¸µĹ޵÷ÎĄ¤ÇÄęµÁ¤µ¤ě¤Ć¤¤¤ë¤ł¤Č¤Ëµ¤¤ň¤Ä¤±¤Ę¤Ż¤Ć¤Ď¤¤¤±¤Ę¤¤ˇŁ¤˝¤Î¤ż¤áˇ˘żż¤ĂÄľ¤°¤ĘŔţ¤ÎŁ´Ľˇ¸µĹ޵÷ÎĄ¤ÎĽ«ľč¤ĎˇÝ(cT)2¤Ç¤˘¤ęˇ˘ĽĐ¤áŔţ¤ÎŁ´Ľˇ¸µĹ޵÷ÎĄ¤ÎĽ«ľč¤ĎˇÝ(cT)2+X2 ¤Č¤Ę¤ëˇŁˇÖµ÷ÎĄ¤ÎĽ«ľčˇ×¤¬ĄŢĄ¤ĄĘĄą¤Ë¤Ę¤ë¤Î¤ĎˇÖĽ«ľčˇ×¤Č¤¤¤¦¸ŔÍŐ¤ÎËÜÍč¤Î°ŐĚŁ¤«¤é¤ą¤ë¤Č´ńĚŻ¤Ç¤˘¤ë¤¬ˇ˘şŁˇÖµ÷ÎĄ¤ÎĽ«ľčˇ×¤ĎˇÝ(cT)2+x2+y2+z2¤ČÄęµÁ¤µ¤ě¤Ć¤¤¤ë¤Î¤Ç¤ł¤ě¤Ç¤č¤¤ˇŁËÜÍč¤Î°ŐĚŁ¤Č¤Ď°ă¤¦»Č¤¤Ęý¤ň¤·¤Ć¤¤¤ë¤ł¤Č¤Ë¤Ę¤ë¤¬ˇ˘ĘŞÍýŔěÍѤÎÍѸě¤Ę¤Î¤Ŕ¤Č»×¤Ă¤ĆÇĽĆŔ¤·¤ĆÍߤ·¤¤ˇŁ
ĄŢĄ¤ĄĘĄą¤Ë¤Ę¤ë¤Î¤¬µ¤¤Ë¤Ę¤ë¤Î¤Ç¤˘¤ě¤Đˇ˘ˇÖ»ţ´ÖĹŞ¤Ęµ÷ÎĄ¤ň¬¤ë»ţ¤Ë¤Ďµ÷ÎĄ¤ÎĽ«ľč¤Ď(cT)2ˇÝx2ˇÝy2ˇÝz2¤ČÄęµÁ¤ą¤ëˇ×¤Č·č¤á¤Ć¤Ş¤¤¤Ć¤â¤č¤¤ˇŁ
ˇˇĄ°ĄéĄŐ¤ň¸«¤ë¤ČĽĐ¤áŔţ¤ÎĘý¤¬Äą¤Ż¸«¤¨¤ë¤¬ˇ˘şŁÄą¤µ¤ÎÄęµÁ¤¬Ł´Ľˇ¸µĹ޵÷ÎĄ¤ÇÄęµÁ¤µ¤ě¤Ć¤¤¤ë¤ł¤Č¤Ëµ¤¤ň¤Ä¤±¤Ę¤Ż¤Ć¤Ď¤¤¤±¤Ę¤¤ˇŁ¤˝¤Î¤ż¤áˇ˘żż¤ĂÄľ¤°¤ĘŔţ¤ÎŁ´Ľˇ¸µĹ޵÷ÎĄ¤ÎĽ«ľč¤ĎˇÝ(cT)2¤Ç¤˘¤ęˇ˘ĽĐ¤áŔţ¤ÎŁ´Ľˇ¸µĹ޵÷ÎĄ¤ÎĽ«ľč¤ĎˇÝ(cT)2+X2 ¤Č¤Ę¤ëˇŁˇÖµ÷ÎĄ¤ÎĽ«ľčˇ×¤¬ĄŢĄ¤ĄĘĄą¤Ë¤Ę¤ë¤Î¤ĎˇÖĽ«ľčˇ×¤Č¤¤¤¦¸ŔÍŐ¤ÎËÜÍč¤Î°ŐĚŁ¤«¤é¤ą¤ë¤Č´ńĚŻ¤Ç¤˘¤ë¤¬ˇ˘şŁˇÖµ÷ÎĄ¤ÎĽ«ľčˇ×¤ĎˇÝ(cT)2+x2+y2+z2¤ČÄęµÁ¤µ¤ě¤Ć¤¤¤ë¤Î¤Ç¤ł¤ě¤Ç¤č¤¤ˇŁËÜÍč¤Î°ŐĚŁ¤Č¤Ď°ă¤¦»Č¤¤Ęý¤ň¤·¤Ć¤¤¤ë¤ł¤Č¤Ë¤Ę¤ë¤¬ˇ˘ĘŞÍýŔěÍѤÎÍѸě¤Ę¤Î¤Ŕ¤Č»×¤Ă¤ĆÇĽĆŔ¤·¤ĆÍߤ·¤¤ˇŁ
ĄŢĄ¤ĄĘĄą¤Ë¤Ę¤ë¤Î¤¬µ¤¤Ë¤Ę¤ë¤Î¤Ç¤˘¤ě¤Đˇ˘ˇÖ»ţ´ÖĹŞ¤Ęµ÷ÎĄ¤ň¬¤ë»ţ¤Ë¤Ďµ÷ÎĄ¤ÎĽ«ľč¤Ď(cT)2ˇÝx2ˇÝy2ˇÝz2¤ČÄęµÁ¤ą¤ëˇ×¤Č·č¤á¤Ć¤Ş¤¤¤Ć¤â¤č¤¤ˇŁ
| (9.6) |
| (9.7) |
| (9.8) |
ÇܤǤ˘¤ëˇŁ
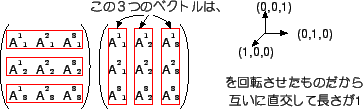
ˇˇ¸ÇÍ»ţ¤Ďˇ˘łĆĘŞÂΤ´¤Č¤Ë°ă¤¦żĘ¤ßĘý¤ň¤ą¤ëˇŁľĺ¤ÎĽ°¤«¤é¤ď¤«¤ë¤č¤¦¤Ëˇ˘´ó¤ęĆ»¤ň¤ą¤ë¤Čdx2¤¬Âż¤Ż¤Ę¤ęˇ˘·ë˛Ě¤Č¤·¤Ć¸ÇÍ»ţ¤ÎżĘ¤ß¤ĎĂ٤ě¤ëˇĘĄ¦ĄéĄ·ĄŢ¸ú˛ĚˇËˇŁÁлҤΥѥéĄÉĄĂĄŻĄą¤Î·×»»¤Ę¤É¤âˇ˘±żĆ°¤·¤Ć¤¤¤ëĘŞÂΤθÇÍ»ţ¤¬Ă»¤Ż¤Ę¤ëˇ˘¤ČąÍ¤¨¤ě¤Đ´Ęñ¤Ç¤˘¤ëˇŁ
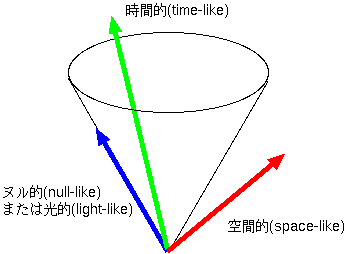
ˇˇ˛ćˇą¤ÎĂΤäƤ¤¤ëÎł»Ň¤ÎŔ¤ł¦Ŕţ¤Ďtime-like¤Ç¤˘¤ë¤«null-like¤Ç¤˘¤ë¤«ˇ˘¤É
¤Á¤é¤«¤Ç¤˘¤ëˇŁŔ¤ł¦Ŕţ¤¬space-like¤Ŕ¤Č¤¤¤¦¤ł¤Č¤ĎĶ¸÷®¤Ç±żĆ°¤·¤Ć¤¤¤ëÎł»Ň¤Ç¤˘¤ë¤Č¤¤¤¦¤ł¤Č¤Çˇ˘¤˝¤ó¤Ę¤â¤Î¤Ď¸«¤Ä¤«¤Ă¤Ć¤¤¤Ę¤¤ˇŁ¤â¤·¸«¤Ä¤«¤Ă¤ż
¤éˇ˘¤˝¤Î¤č¤¦¤ĘÎł»Ň¤Ď¸«¤ëżÍ¤ÎΩľě¤Ë¤č¤Ă¤Ć¤Ď̤Í褫¤é˛áµî¤Ë¸ţ¤«¤Ă¤ĆÁö¤ë¤ł¤Č¤Ë¤Ę¤ë¤Î¤Çˇ˘°ř˛ĚΧ¤ËÄńż¨¤ą¤ë¤ł¤Č¤Ë¤Ę¤ë¤Ŕ¤í¤¦ˇŁ
ˇˇŔ¤ł¦Ŕţ¤¬null-like¤Ë¤Ę¤ë¤Čˇ˘¸ÇÍ»ţ¤ÎĘѲ˝d¦Ó¤Ď0¤Ë¤Ę¤Ă¤Ć¤·¤Ţ¤¦ˇŁ¤č¤Ă¤Ć¸÷¤Î¤č¤¦¤Ë¸÷®¤ÇĆ°¤Ż¤â¤Î¤ËÂФ·¤Ć¤Ď¸ÇÍ»ţ¤¬ÄęµÁ¤Ç¤¤Ę¤¤ˇĘ¤˘¤ë¤¤¤ĎÄęµÁ¤·¤Ć¤â¤˝¤ě¤ĎĘѲ˝¤·¤Ę¤¤ˇËˇŁ
|
| (9.9) |

| ( |
| ) |
| (9.10) |
| (9.11) |
| ( |
| ), |
| ( |
| ), |
| ( |
| ) |
| ( |
|
|
| ( |
|
|
| ( |
|
|
| (9.12) |
| (9.13) |
| (9.14) |
| (9.15) |
| (9.16) |
| (9.17) |
| (9.18) |
| (9.19) |
| (9.20) |
| (9.21) |
| (9.22) |
| (9.23) |
| (9.24) |
ˇˇ¤ł¤ł¤Ţ¤Ç¤Îή¤ě¤ňŔ°Íý¤·¤č¤¦ˇŁ¤ł¤ł¤Ţ¤Çˇ˘ÁęÂĐŔ¸¶ÍýˇĘŔäÂжő´Ö¤Ď¸şß¤·¤Ę¤¤¤Č¤¤¤¦¤ł¤ČˇË¤ň°ě¤Ä ¤Î¸¶Íý¤Č¤·¤ĆÂŞ¤¨¤Ć¤¤żˇŁ¤˝¤·¤Ćˇ˘ĹĹĽ§µ¤¤Î´đËÜˡ§¤Ç¤˘¤ëĄŢĄĂĄŻĄąĄ¦Ą§ĄëĘýÄřĽ°¤¬ÁęÂĐŔ¸¶Íý¤ňËţ¤ż¤·¤Ć¤¤¤Ę¤¤¤č¤¦¤Ë¸«¤¨¤ëˇĘĄ¬ĄęĄěĄ¤ĘŃ´ą¤ÇÉÔĘѤǤʤ¤ˇË¤ł ¤Č¤«¤éˇ˘ĄŢĄĂĄŻĄąĄ¦Ą§ĄëĘýÄřĽ°¤ňÇË´ţ¤ą¤ë¤«ˇ˘Ą¬ĄęĄěĄ¤ĘŃ´ą¤ňÇË´ţ¤ą¤ë¤«¤ÎĆóĽÔÂň°ě¤ňÇ÷¤é¤ě¤ë¤ł¤Č¤Ë¤Ę¤Ă¤żˇŁĄŢĄ¤Ą±ĄëĄ˝Ąóˇ¦ĄâˇĽĄěˇĽ¤ň¤Ď¤¸¤á¤Č¤ą¤ëĽÂ¸ł»öĽÂ ¤«¤éˇ˘ÇË´ţ¤µ¤ě¤ë¤Ů¤¤Ę¤Î¤ĎĄ¬ĄęĄěĄ¤ĘŃ´ą¤Ç¤˘¤ęˇ˘ĄíˇĽĄěĄóĄÄĘŃ´ą¤Ř¤Č˝¤Ŕµ¤ą¤Ů¤¤Ç¤˘¤ë¤ł¤Č¤¬¤ď¤«¤Ă¤żˇŁ¤Ţ¤żˇ˘»ţ´Ö¤Č¶ő´Ö¤ňĘĚĘŞ¤ČąÍ¤¨¤ë¤Î¤Ç¤Ď¤Ę¤Żˇ˘ąç¤ď¤» ¤ĆŁ´Ľˇ¸µ¤Î»ţ¶ő¤ňąÍ¤¨¤Ćˇ˘¤˝¤ÎŁ´Ľˇ¸µ¤ňş®¤Ľąç¤ď¤»¤ë¤č¤¦¤ĘĘŃ´ą¤Č¤·¤ĆĄíˇĽĄěĄóĄÄĘŃ´ą¤ňÂŞ¤¨¤ě¤Đ¤č¤¤¤ł¤Č¤¬¤ď¤«¤Ă¤żˇŁ ˇˇ¤˝¤ł¤Ç¤â¤¦°ěĹٸµ¤Ë¤â¤É¤Ă¤ĆąÍ¤¨¤ë¤Čˇ˘¤˝¤â¤˝¤âÁęÂĐŔ¸¶Íý¤¬ąÍ¤¨¤é¤ě¤ż¤Î¤Ďˇ˘ĄËĄĺˇĽĄČĄóÎĎłŘ ¤ĎĄ¬ĄęĄěĄ¤ĘŃ´ą¤ÇÉÔĘѤǤ˘¤Ă¤ż¤«¤é¤Ç¤˘¤ëˇŁ¤·¤«¤·ĹĹĽ§µ¤¤ËÂФą¤ëąÍ»ˇ¤«¤éĄ¬ĄęĄěĄ¤ĘŃ´ą¤ĎĄíˇĽĄěĄóĄÄĘŃ´ą¤Ř¤Č˝¤Ŕµ¤µ¤ě¤ż¤Î¤Ŕ¤«¤éˇ˘şŁĹ٤ϥ˥塼ĄČĄóÎϳؤň ĄíˇĽĄěĄóĄÄĘŃ´ą¤ÇÉÔĘѤˤʤë¤č¤¦¤Ëşî¤ęÄľ¤µ¤Ę¤Ż¤Ć¤Ď¤¤¤±¤Ę¤¤ˇŁ¤ł¤ÎľĎ¤ÇąÍ¤¨¤ë¤Î¤ĎĄíˇĽĄěĄóĄÄĘŃ´ą¤ÇÉÔĘѤˤʤë¤č¤¦¤Ëşî¤ęÄľ¤µ¤ě¤żż·¤·¤¤Îϳء˘¤ą¤Ę¤ď¤ÁÁęÂĐ ĎŔĹŞÎϳؤǤ˘¤ëˇŁ ˇˇ¤˝¤ł¤Çˇ˘¤É¤Î¤č¤¦¤Ë¤·¤ĆÁęÂĐĎŔĹŞÎϳؤňşî¤ë¤«ˇ˘¤˝¤ÎłµÍפň˝Ň¤Ů¤ëˇŁĄËĄĺˇĽĄČĄóÎϳؤδđËܤǤ˘¤ë±żĆ°ĘýÄřĽ°¤Ď
Ą¬ĄęĄěĄ¤ĘŃ´ą ĄíˇĽĄěĄóĄÄĘŃ´ą ĽÂ¸łĹ޸ˇľÚ ĄËĄĺˇĽĄČĄóÎĎłŘ(ČóÁęÂĐĎŔĹŞ) ˇű ˇß 19Ŕ¤µŞ¤Ţ¤Çˇű ĄŘĄëĄÄ¤ÎĘýÄřĽ°(ČóÁęÂĐĎŔĹŞ) ˇű ˇß ˇß ĄŢĄĂĄŻĄąĄ¦Ą§ĄëĘýÄřĽ°(ÁęÂĐĎŔĹŞ) ˇß ˇű ˇű ÁęÂĐĎŔĹŞÎϳء© ˇß ˇű ˇű
| (10.1) |
|
˘ß ˘ßx¦Í |